Project 6: Path Planning via Visibility Graph
- Assigned: Tuesday, April 18
- Due: Sunday April 30th
- Group policy: Partner-optional
- Collaboration policy: Level 1
In this project you will implement geometric motion planning for a point robot moving among polygonal obstacles in 2d using the visibility graph (VG) approach.

Overview
One of the fundamental problems in robotics is motion planning: given a robot moving in an environment (or physical space), a start position and an end position, find a path so that the robot can move from start to end, without collisisons. Generally speaking, in most situations we are happy to compute just a path, not necessarily the optimal/shortest, but in some special situations we are able to compute an optimal (shortest) path.
In this first project we will consider a simple instance of the path planning problem and make some simplifying assumptions which will allow us to do optimal planning:
2D: We’ll assume that the environment consists of a set of 2D polygons that represent the obstacles. Furthermore, we assume that the robot is moving in a large bounding box B that contains all polygons.
Static: We’ll assume that the environment is static (the obstacles are fixed).
Known: The environment is known, i.e. the robot knows the list of obstacles with their vertices and edges. That is, the robot does not rely on sensors to learn the environment, instead the environment is given.
Point robot: the robot is assume to be a point (yes, that’s not very realistic, but it’s a good place to start).
The general idea of motion planning is to start by computing a decomposition of the free space (the space where the robot can move) into cells, and construct a road map of the free space to guide the motion between neighboring cells. The road map is essentially a graph of free space. Ideally we want to build the roadmap so that:
1. Any path in the road map corresponds to a collision-free path in the free space.
2. Any path in the free-space corresponds to a path in the road map.
If we are able to compute a road map of free space with these properties, then to move from a location s to a location t, we will find a path in the road map from s to t. We know that any path in the road map is colision-free (by (1)), and we know that if a path in the road map does not exist, then no path exists (by (2)). Essentially we have reduced the motion planning problem to a path problem in a graph.
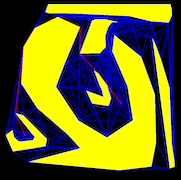
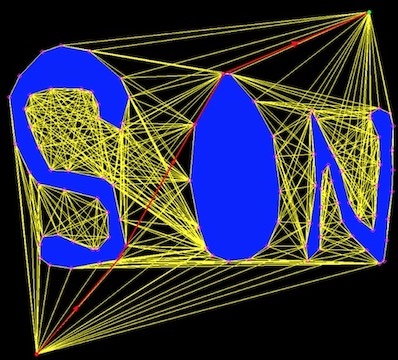
For a point robot moving among polygonal obstacles in the plane, it is possible to construct a type of roadmap that will allow to compute optimal paths: the visibility graph. This is a graph whose vertices are the vertices of the obstacles, and its edges (u,v) are all the pair of vertices that can “see” each other, that is, segment uv does not intersect the interior of any obstacle. Some screenshots above and below.
Shortest paths in 2D have the very nice and convenient property that they are straight lines, and they have to go through the vertices of the obstacles (a path that takes you to a point interior to an edge and then continues to a vertex is not shortest). This basically means that any shortest path will be contained in the VG. Once the visibility graph (VG) is computed, the shortest paths from start to end can be computed for e.g. using Dijkstra’s algorithm.
This project
When you start your code, have a pre-set scene with polygonal obstacles. Allow the user to reset the scene and and enter polygons using the mouse (in a manner similar to previous projects).
Once the scene is done, compute and render the visibility graph.
Allow the user to click on the start and end position of the “robot” in the scene. Then, run Dijkstra’s algorithm on the VG and render the resulting path (for e.g. in a different color and different line width). Let the user enter different start and end positions and re-compute the path.
All the geometric primitives that you’ll need for this project, you already have them. So that part should feel easier. The new part is implementing Dijsktra’s algorithm. In csci2200 we discussed the pseudocode for Dijkstra. In this project you have an opportunity to work through the details.
Dijkstra’s algorithm
In theory we always assume that the graph is given nicely in an adjacency list form. Here you have a bunch of edges, and you will need to create an adjacency list for the VG graph.
Once you have an adjacency list, you can pretty much use Dijkstra’s algorithm straight out of a textbook.
Extra features
- Implement a point-in-polygon method and use it to detect if start or end points are inside an obstacle.
- Detect if a polygon is self-intersecting.
- Detect if polygons are overlapping.
- Draw the polygons filled. Note that openGL can only fill correctly convex polygons, so if you want it filled, you’ll need to compute a triangulation.
What and how to turn in
You will receive the assignment on GitHub; it contains no code. To submit, simple push your code into your github repository for this assignment. Do not turn in any object or executable files.
Add a README file containing: a brief, description of the project; info on the interface, i.e. everything one needs to know in order to run your code; a list of known bugs (if any) and when they happen; a list of the main functions you implemented (); any extra features you implemented.
Also: Capture a movie of the screen while you demo your code and upload it to github, either in #general or a a direct message. To demo, no voice, just run your code and show what it can do (To capture a movie on a Mac press shift+command+5 and then choose the option that says record selected portion).
Start early, program well and enjoy the proces!
By now you know how frustrating debugging can be. It is crucial that you think before you code, develop your code one piece at a time, and test before you move on to the next. From the beginning, design your code knowing that you will spend 90% of the time debugging it. If you approach your algorithm with a theoretical mindset, and think before you start coding, you will be a lot more effective.